
2026年07月03日(金)
- パワーエレクトロニクス基礎
ベクトル制御の電流指令はどう作られる?速度指令・位置指令とのつながりを解説【モータ制御シリーズ 中級③】
ベクトル制御では、速度指令や位置指令は制御内部でd軸電流指令・q軸電流指令へ変換されます。本記事では、その指令がどのような流れで電流指令につながるのかをわかりやすく解説します。
前回の記事では、ベクトル制御の実機評価で確認したい内部信号や、指令値と実測値を比較した原因切り分けの基本について解説しました。
今回は、外部から与えられる指令がどのように電流指令へつながるのかを整理し、実機評価で確認すべきポイントを解説します。
ベクトル制御では速度指令や位置指令はどのように電流指令へつながるのか?
ベクトル制御では、制御内部でd軸電流・q軸電流を扱います。
しかし、実際の装置では、外部から与えられる指令が電流指令とは限りません。
たとえば、回転速度を一定に保ちたい装置では速度指令が与えられます。位置決めを行う装置では位置指令が与えられます。トルクを直接扱う構成では、トルク指令が与えられることもあります。
これらの指令は、そのままモータに出力されるわけではありません。制御内部で段階的に処理され、最終的にd軸電流指令やq軸電流指令、電圧指令、PWM出力へつながっていきます。
つまり、外から見ると速度や位置を制御しているように見えても、内側では電流や電圧を調整しながらモータを動かしています。
ベクトル制御のd軸電流指令・q軸電流指令とは?
電流指令とは、制御内部で「どの方向に、どの程度の電流を流したいか」を表す目標値です。
ベクトル制御では、三相電流をd軸電流とq軸電流に変換して扱います。そのため、電流指令もd軸電流指令とq軸電流指令として扱われます。
一般的に、q軸電流はトルクに関係する成分として扱われます。必要なトルクを出したい場合、q軸電流指令が重要になります。
d軸電流は、磁束や弱め界磁制御に関係する成分として扱われます。永久磁石同期モータでは、基本的な運転条件でd軸電流を0付近に保つ構成もあります。一方、高速域や効率を重視する制御では、d軸電流の扱いが重要になる場合があります。
ただし、d軸電流指令やq軸電流指令は、必ずしも外部から直接入力されるものではありません。多くの場合、上位の指令や制御器の出力をもとに、内部で生成されます。
トルク指令はどのようにq軸電流指令へ変換されるのか?
トルク指令を直接制御したい場合、上位からトルク指令が与えられることがあります。
モータで必要なトルクを出すには、トルクに関係する電流を適切に流す必要があります。永久磁石同期モータのベクトル制御では、q軸電流がトルクに大きく関係します。
そのため、トルク指令をもとにq軸電流指令が決まり、そのq軸電流指令に実際のq軸電流が追従するように制御されます。
このとき、q軸電流だけを見ればよいとは限りません。d軸電流、角度情報、電圧指令、電流制限なども、トルクの出方に影響します。
つまり、トルク指令は、制御内部でq軸電流指令や電圧指令へつながり、最終的にインバータ出力としてモータに反映されます。
速度指令はどのようにq軸電流指令へつながるのか?
速度指令が外部から与えられます。
速度制御では、速度指令と実速度を比較し、その差をもとに制御器が出力を作ります。この出力は、トルクに相当する指令として扱われることがあります。
そのトルク相当の指令をもとに、q軸電流指令が作られます。そして、q軸電流指令に実際のq軸電流が追従するように、内側で電流を調整します。
流れとしては、次のように考えると整理しやすくなります。
速度指令
→
速度制御
→
トルク相当の指令
→
q軸電流指令
→
電流の調整
→
電圧指令
→(※)
(※)→
PWM
→
インバータ
→
モータ
そのため、速度が目標値に追従しない場合でも、速度制御器だけを見ればよいとは限りません。
速度制御の出力であるトルク相当の指令が適切に出ているのか、その先のq軸電流指令や実q軸電流が追従しているのかを分けて確認する必要があります。
ベクトル制御では位置指令はどのようにモータへ伝わるのか?
位置指令が外部から与えられます。
位置制御では、位置指令と実位置を比較し、その差をもとに速度指令が作られる構成があります。
その速度指令をもとに速度制御が行われ、さらにその内側でトルク相当の指令や電流指令が作られます。
流れとしては、次のように整理できます。
位置指令
→
位置制御
→
速度指令
→
速度制御
→
トルク相当の指令
→
q軸電流指令
→(※)
(※)→
電流の調整
→
電圧指令
→
PWM
→
インバータ
→
モータ
つまり、位置制御であっても、最終的には内側の電流や電圧を調整しながらモータを動かしています。
位置決めがずれる場合、位置制御器だけが原因とは限りません。速度応答、電流応答、角度情報、電圧制限、機械系の影響などを合わせて確認する必要があります。
このように、位置制御では外側から内側へ複数の段階を通ってモータ出力につながるため、どの段階で差が出ているのかを分けて見ることが重要です。
速度や位置の問題では、なぜq軸電流指令や実電流を確認する必要があるのか?
モータ制御のトラブルでは、外から見える現象だけで原因を判断しにくい場合があります。
たとえば、速度が目標値に届かない場合、速度制御の設定だけが原因に見えることがあります。
しかし実際には、上位側から十分なトルク相当の指令が出ていない、q軸電流指令に対して実q軸電流が追従していない、必要な電圧が出せていない、といった内側の要因が影響している場合があります。
位置決めがずれる場合も同様です。位置制御の応答だけでなく、速度応答や電流応答、エンコーダの状態、機械系の影響を確認する必要があります。
つまり、速度や位置の問題に見えていても、内側の電流指令や実電流の状態を確認することで、原因を切り分けやすくなります。
ベクトル制御の実機評価ではどの指令値・実測値を確認すればよいのか?
実機評価では、外側の指令と内側の指令を分けて確認することが重要です。
たとえば、速度が目標値に届かない場合でも、速度指令、実速度、速度制御器の出力、q軸電流指令、実q軸電流のどこで差が出ているかによって、確認すべき内容は変わります。
上位側の指令がすでに大きく変動している場合は、速度制御や位置制御、負荷変動、機械系の影響を確認します。
一方で、上位側の指令は安定しているのに実電流が追従していない場合は、dq制御、電圧指令、PWM、電流検出、角度情報などを確認します。
このように、どの段階の指令と実測値を比較しているのかを明確にすると、原因の切り分けがしやすくなります。
| 見えている現象 | 確認したいこと |
|---|---|
| 速度が目標値に届かない | 速度指令、実速度、トルク相当の指令、q軸電流指令の流れを見る |
| q軸電流指令が大きく変化している | 速度制御や位置制御など、上位側の指令が変動していないか |
| q軸電流指令はあるが実q軸電流が追従しない | 電流応答、電圧指令、PWM、電流検出、角度情報を確認する |
| 位置決めがずれる | 位置指令、実位置、速度応答、電流応答、機械系の状態を見る |
dq制御のチューニングでは、なぜ電流指令の流れを理解する必要があるのか?
dq制御のチューニングでは、d軸電流指令と実d軸電流、q軸電流指令と実q軸電流の関係を確認します。
しかし、電流指令がどこから作られているのかを理解していないと、電流応答だけを見て判断してしまうことがあります。
たとえば、速度制御から出ているトルク相当の指令がすでに大きく変動している場合、q軸電流の変化は電流調整だけの問題ではありません。
反対に、上位側の指令は安定しているのに実電流が追従していない場合は、dq制御のチューニングや電流検出、角度情報、電圧指令などを確認する必要があります。
このように、電流指令が作られる流れを理解しておくことで、dq制御のチューニングで何を見るべきかが整理しやすくなります。
まとめ|ベクトル制御では速度指令・位置指令からd軸・q軸電流指令への流れを理解することが重要
ベクトル制御では、外部から常にd軸電流やq軸電流を直接指令するとは限りません。
速度制御では、速度指令と実速度の差をもとにトルク相当の指令が作られ、その結果としてq軸電流指令につながる構成があります。
位置制御では、位置指令から速度指令が作られ、その内側で速度制御、さらに電流指令へつながる構成があります。
そのため、実機評価では、外側の速度や位置の指令と、内側のd軸・q軸電流を分けて確認することが重要です。
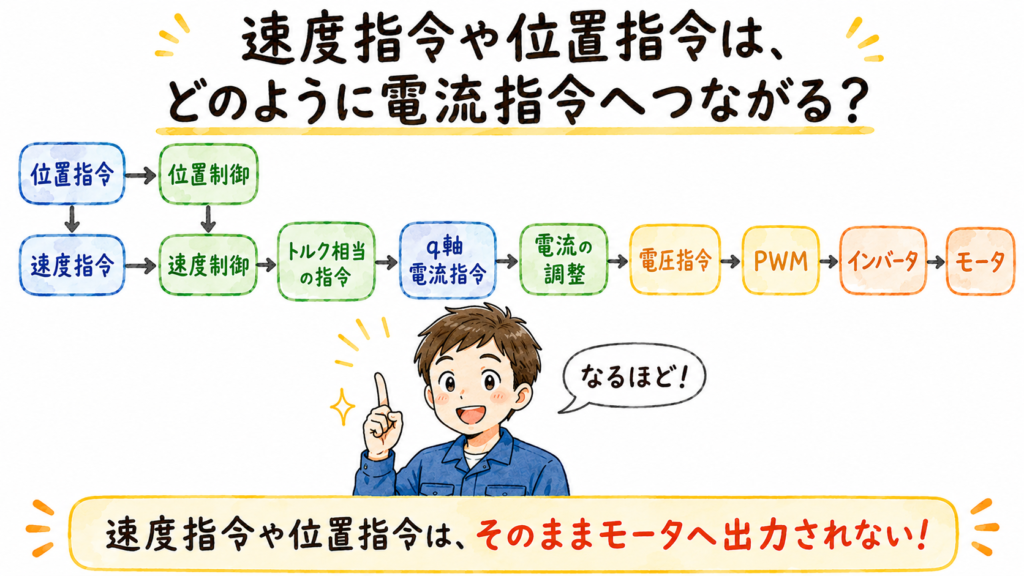
ベクトル制御における位置指令・速度指令から電流指令、PWM、モータまでの制御の流れ
次回は、dq制御のチューニングがうまくいかない原因について、PIゲイン、モータ定数、角度情報、軸間干渉などの観点から整理します。
モータ制御・インバータ制御の評価環境をお探しの方へ
ベクトル制御の開発や評価では、速度指令、位置指令、d軸電流・q軸電流、PWM指令などの内部状態を確認できる環境が重要になります。
Mywayプラスでは、モータ制御を実機で学習・評価できるモータ駆動パッケージをご用意しています。
インバータや制御コントローラ、モータ制御ソフトウェアなどを一式そろえた環境で、ベクトル制御の学習や実機評価に活用いただけます。
